До уловлювачів, названими уловлювачами жорсткого дії (далі УЖД), належать уловлювачі наступних типів:
А) клинові;
Б) ексцентрикові;
В) роликові.
 Їх основною особливістю є різкість (або жорсткість) спрацьовування, обумовлена тим, що при їх включенні відбувається швидке наростання сил гальмування до значень, що визначаються кількістю енергії, що міститься в падаючій кабіні (або противазі), так як в складі таких уловлювачів немає амортизаторів (наприклад, пружин). У разі спрацювання уловлювачів подібного (жорсткого) типу, кабіна/противага, перш ніж зупинитися, проходить незначну відстань, рівну всього лише 5-15 міліметрів, відчуваючи при цьому значне за величиною негативне прискорення. Тому уловлювачі такого типу дозволені до застосування тільки в ліфтах, номінальна швидкість руху кабін яких менше (або дорівнює) 0,75 м / сек. Ці уловлювачі закріплюють на нижніх або верхніх ригелях кабін / противаг на кожній стороні по одному.
Їх основною особливістю є різкість (або жорсткість) спрацьовування, обумовлена тим, що при їх включенні відбувається швидке наростання сил гальмування до значень, що визначаються кількістю енергії, що міститься в падаючій кабіні (або противазі), так як в складі таких уловлювачів немає амортизаторів (наприклад, пружин). У разі спрацювання уловлювачів подібного (жорсткого) типу, кабіна/противага, перш ніж зупинитися, проходить незначну відстань, рівну всього лише 5-15 міліметрів, відчуваючи при цьому значне за величиною негативне прискорення. Тому уловлювачі такого типу дозволені до застосування тільки в ліфтах, номінальна швидкість руху кабін яких менше (або дорівнює) 0,75 м / сек. Ці уловлювачі закріплюють на нижніх або верхніх ригелях кабін / противаг на кожній стороні по одному.
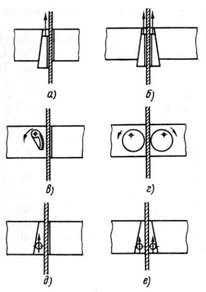
На малюнку 1, розташованому далі за текстом, на позиціях а) і б) показано пристрій клинових уловлювачів. При цьому схема, зображена на малюнку а), відповідає несиметричному типу таких уловлювачів, а зображена на малюнку б) - симетричного типу. Як тільки клини починають рухатися щодо ригеля кабіни вгору (їх рух на малюнку вказано стрілками), вони притискають напрямні (показані заштрихованої смугою) до упорної ригельної колодки (рис. 1, а) або затискають напрямні між собою (малюнок 1, б). Геометричні розміри клина вибираються так, щоб самозаклинювання системи виникало вже при невеликій за величиною силі, яка додається до клину і піднімає його вгору. Для збільшення сили зчеплення між направляючою і клином на останньому нанесено зуби. При спрацьовуванні клинових уловлювачів їх клини залишають сліди на напрямних, тому після кожного випадку спрацьовування такого типу уловлювачів напрямні повинні оглядатися, а їх робочі поверхні зачищають.
Малюнок 1. Пристрій УЖД.
Де:
1. уловлювачі клинові показані на позиціях а) і б);
2. уловлювачі ексцентрикові - на позиціях в) і г);
3. уловлювачі роликові - на позиціях д) і е).
При спрацьовуванні несиметричних уловлювачів відбувається зміщення кабіни в напрямку клина, за рахунок чого вибирається зазор між колодкою ригеля і напрямною. Тому розблокувати кабіну при наявності несиметричних уловлювачів важче, ніж в разі, якщо використовуються уловлювачі симетричного типу.
На малюнку 1 в) і г) показано пристрій ексцентрикових уловлювачів несиметричного і симетричного типу. Ексцентрики цих уловлювачів фіксуються на кінці вала за допомогою шпонки. До цього ж валу прикріплена пружина, яка прагне повернути вал і пов'язані з ним ексцентрики в сторону напрямної. Але цьому протидіє система важелів, з'єднаних з канатом пристрою обмеження швидкості.
У разі виникнення аварії вал звільняється, при цьому ексцентрики, повертаючись, приходять в зіткнення з направляючими, а тертя, що виникає між ними, викликає заклинювання, що перешкоджає подальшому руху кабіни ліфта вниз. Сила пружини, яка повертає вал з ексцентриками, повинна бути невеликою, але достатньою для забезпечення дотику поверхні ексцентрика з поверхнею напрямної.
Всі геометричні параметри ексцентрика розраховуються так, щоб при зіткненні ексцентриків з направляючими виникав ефект самозаклинювання.
На малюнку 1 д) і е) показано пристрій роликових уловлювачів. Їх принцип дії заснований на тому, що результатом зіткнення ролика з поверхнею направляючої і з поверхнею колодки ригеля, виконаної з нахилом, є самозаклинювання системи. Для забезпечення можливості виникнення такого самозаклинювання, поверхню колодки ригеля виконують з певним кутом нахилу по відношенню до положення площини напрямної.




 Їх основною особливістю є різкість (або жорсткість) спрацьовування, обумовлена тим, що при їх включенні відбувається швидке наростання сил гальмування до значень, що визначаються кількістю енергії, що міститься в падаючій кабіні (або противазі), так як в складі таких уловлювачів немає амортизаторів (наприклад, пружин). У разі спрацювання уловлювачів подібного (жорсткого) типу, кабіна/противага, перш ніж зупинитися, проходить незначну відстань, рівну всього лише 5-15 міліметрів, відчуваючи при цьому значне за величиною негативне прискорення. Тому уловлювачі такого типу дозволені до застосування тільки в ліфтах, номінальна швидкість руху кабін яких менше (або дорівнює) 0,75 м / сек. Ці уловлювачі закріплюють на нижніх або верхніх ригелях кабін / противаг на кожній стороні по одному.
Їх основною особливістю є різкість (або жорсткість) спрацьовування, обумовлена тим, що при їх включенні відбувається швидке наростання сил гальмування до значень, що визначаються кількістю енергії, що міститься в падаючій кабіні (або противазі), так як в складі таких уловлювачів немає амортизаторів (наприклад, пружин). У разі спрацювання уловлювачів подібного (жорсткого) типу, кабіна/противага, перш ніж зупинитися, проходить незначну відстань, рівну всього лише 5-15 міліметрів, відчуваючи при цьому значне за величиною негативне прискорення. Тому уловлювачі такого типу дозволені до застосування тільки в ліфтах, номінальна швидкість руху кабін яких менше (або дорівнює) 0,75 м / сек. Ці уловлювачі закріплюють на нижніх або верхніх ригелях кабін / противаг на кожній стороні по одному.